



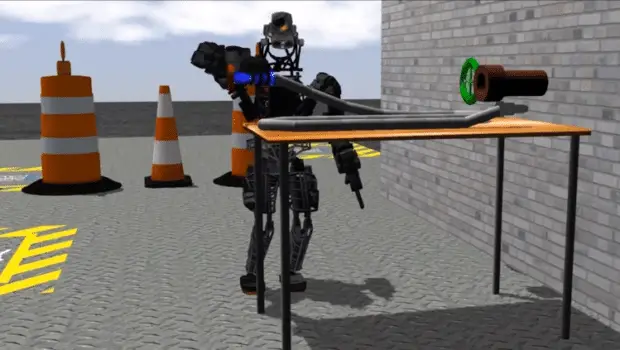
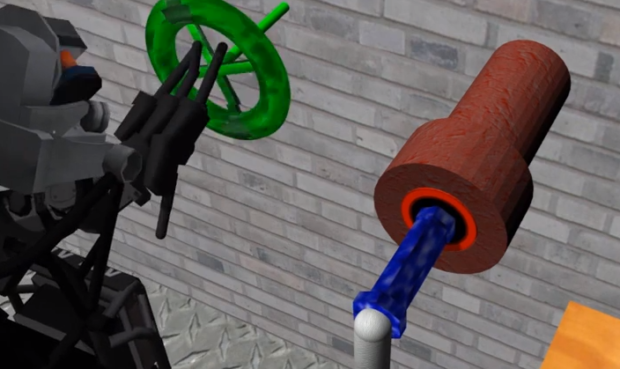
It is only less than a month before the robot struggles organized by DARPA, the formula of which and the tasks waiting for the machines are briefly described here. Let us remind you that the aim of the competition is to select the most reliable robots and the best adapted to work in hazardous conditions, for example with radioactive spills. However, before robots enter the real obstacle course and undergo demanding tests, such as manipulating objects, driving a vehicle or cutting walls, they will have to face tasks in the virtual world. The organizers will use a three-dimensional environment called Gazebo. It is part of the Robot Operating System project (open source software for controlling various parts of robots) and has been funded by DARPA in recent years. In the competition, it will be used to simulate various physical conditions, including variable lighting, in order to avoid later unforeseen behavior or collisions, and thus – possible damage to the equipment.
The chief engineer of the Open Soyurce Robotics Foundation, Nate Koenig, who has been responsible for leading the Gazebo development team for several years, ensures that his organization is working on the most faithful representation of physics in the environment. Yes, in order to avoid problems when switching to a real robot control later, which will have to face this physics in practice. The use of a virtual 3D environment for testing has many advantages – first of all, it is a cheap and simple way to freely experiment with machines, while saving yourself the risk of incurring losses in the event of damage to expensive equipment. Simulations can also be run independently, so that many people can work on different parts of it at the same time.
Pras Velagapudi from Carnegie Mellon University (Pennsylvania, USA), a member of one of the competing teams, believes that it is a great help for anyone interested in getting started with robotics. In the past, you had to create everything from scratch, not only assemble the device, but write drivers and software for it, solve the problem of running a simulation, and perhaps create your own tools for it. This opinion is shared by Brian Benoit, Senior Product Manager at Rethink Robotics. In his words, if you have a really good idea of a machine and the conditions for its creation, the last thing you want to think about is, for example, having to re-invent existing mathematical equations for the movement of a robot’s arms. There is some experience behind this statement; Rethink once developed its own simulation platform for commercial purposes, but the company continued to use ROS and Gazebo. They are used by several industrial robots that are easy to program and designed to assist with simple operations on the production line. Rethink also releases his first robot, Baxter, for educational purposes and encourages experimenting with it using the Gazebo.
Of course, the three-dimensional environment has its limitations. The real world is so complex that it’s hard to include all the physical nuances in the software. Velagapudi even mentions difficulties with the precise simulation of the contact between the machine and the ground.
Source: TechnologyReview; Photos: DARPA
Related posts:
 Russia plans to send FEDOR humanoid robots into space
Russia plans to send FEDOR humanoid robots into space  Robots building robots at a Swiss factory ABB
Robots building robots at a Swiss factory ABB  These three robots will revolutionize agriculture
These three robots will revolutionize agriculture  ROG MATRIX GeForce RTX 2080 Ti with integrated water cooling
ROG MATRIX GeForce RTX 2080 Ti with integrated water cooling  Special vests protect Amazon employees from robots
Special vests protect Amazon employees from robots  The semi-automatic Kiwibot robots are great at delivering food
The semi-automatic Kiwibot robots are great at delivering food



